A few weeks ago I wanted to build one of the awesome projects of the MindStorms Ultimate Builders Set again, but didn’t want to dig up an old Windows machine or VM to install the original software (the building instructions were all on the CD-ROM, no paper). So I went online to see if anyone had ever made them available like some of the other sets that were CD-ROM only (like Spybotics). But I couldn’t find them anywhere.
That was a few weeks ago. I now understand why no one ever did this… I’m still sweating 😉
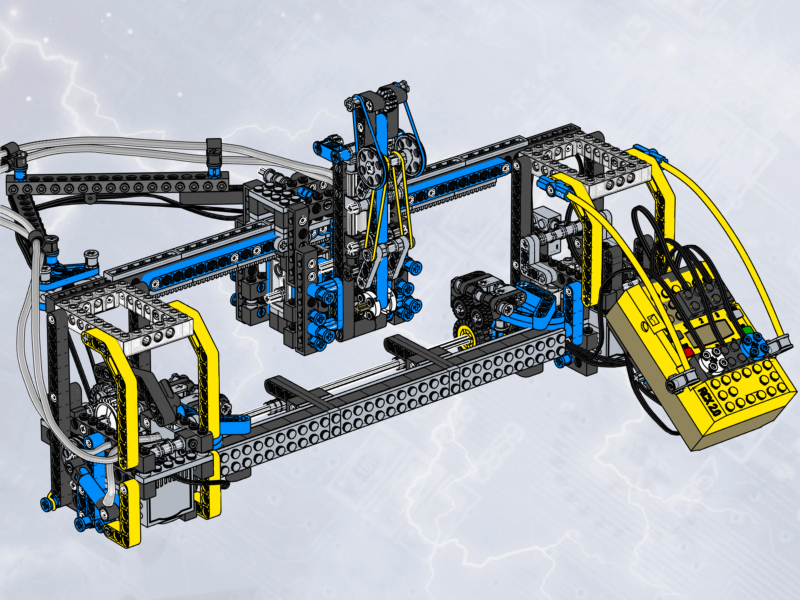
Plotter project
Download it here.
I am now building these projects one by one to see if I’ve made any mistakes. The CD-ROM had small movies included in the instruction steps, most of which are probably not that important, but for some of them I may need to find a way of inserting a shot from the movie into the instructions.
Version history:
0.2 – verified the plotter project with all its modules: corrected one image in motor module 2 and added two images to the pen module.
0.1 – initial version.